Group Alpha's "Helman Motor Controller"
Because of the ease of use and robustness of Trace Systems’ TCPmaker , we were able to get the user interface up and running in 10% of the allocated time. We would definitely recommend it to anyone implementing a web appliance!
Jerry Crane
Group Alpha, Inc.
Helman Motor Controller
The Helman motor controller is a product which Group Alpha designed and builds for Helman Engineering of
The controller is based on a Microchip PIC32 processor. This processor performs the basic signal conversion, loop control, and waveform generation to drive the motor. A simplified block diagram is shown below.
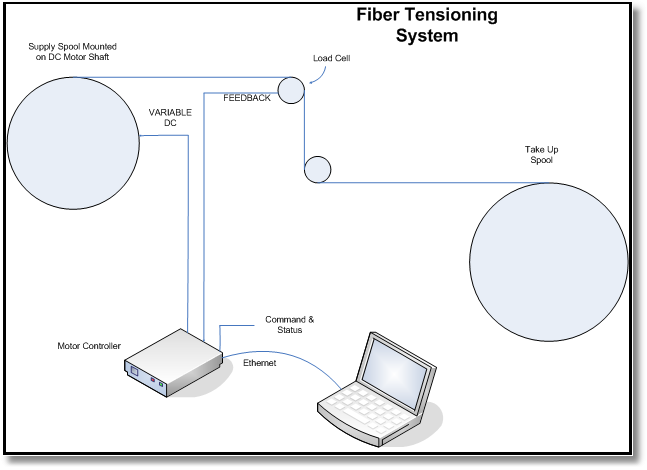
The DC motor‘s spindle is used to mount the supply spool of fiber. The motor is a ¾ HP 130V DC motor. The fiber from the supply spool travels across an idler pulley attached to a load cell which measures the amount of tension in the fiber. The fiber then continues on to another idler direction changing pulley and on to the take up spool.
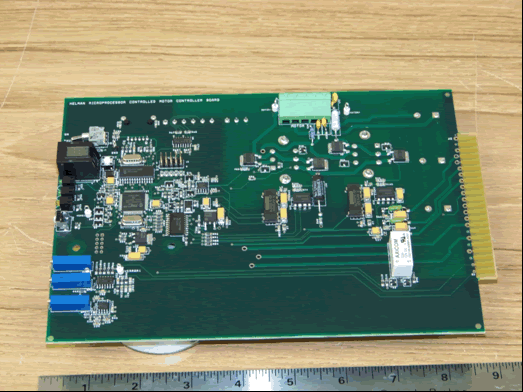
The DC motor is driven bi-directional by the motor controller to maintain constant tension in the fiber. The output of the controller is basically a 500W four quadrant PWM amplifier operating at 20 KHz. The controller uses a set of command signals (enable, command) to control the tension and it provides a set of status signals to provide remote monitoring of operating and fault status. Photographs of the PCB for the controller is shown below.
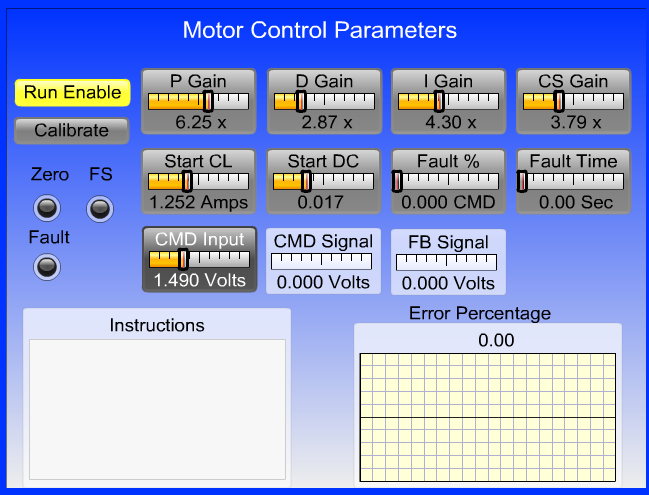
The system software uses the Microchip TCP/IP stack to implement a web server that provides all of the user interface information to a PC connected via the Ethernet interface on the card. When the system was in the planning stage we planned on the web server function and user interface to take about the same time as the motor control software. Because of the ease of use and robustness of “Trace Systems’ TCPMaker”, we were able to get the user interface up and running in 10% of the allocated time. We would definitely recommend it to anyone implementing a web appliance!
Jerry Crane
Group Alpha, Inc.